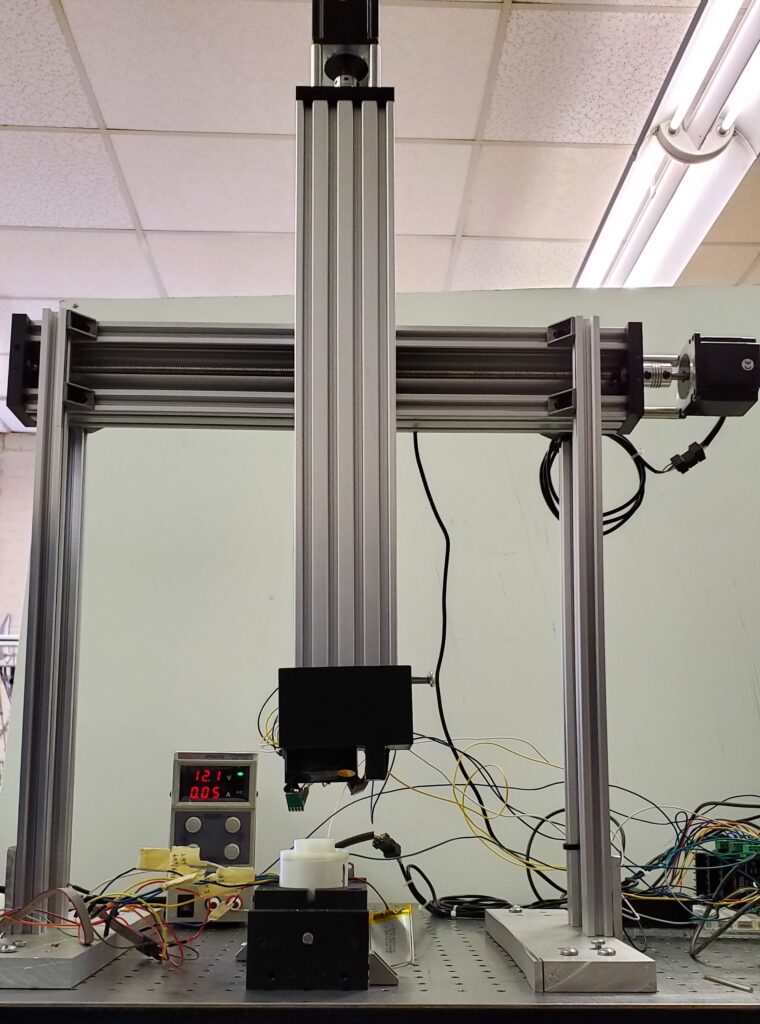
This robotic manipulator can apply 3D forces simultaneously. The structure of the manipulator is based on three 500 mm aluminum C-Beam linear actuators with lead screw-mounted gantry carts. Each linear actuator is powered by NEMA-23 stepper motors. The linear actuators are supported by a total of four aluminum 20 × 20 mm linear rails connected using spring-loaded tee nuts and cast aluminum corner brackets. The supporting beams are screwed into two aluminum base plates along with side support brackets. They are connected to the base and are screwed to an optical table. A 3D-printed end effector is attached to the bottom of the first linear actuator. Three unidirectional commercially available (Singletact Inc.) capacitive-based force measuring sensors are used to determine how much force is applied in each of the three directions by the test setup.