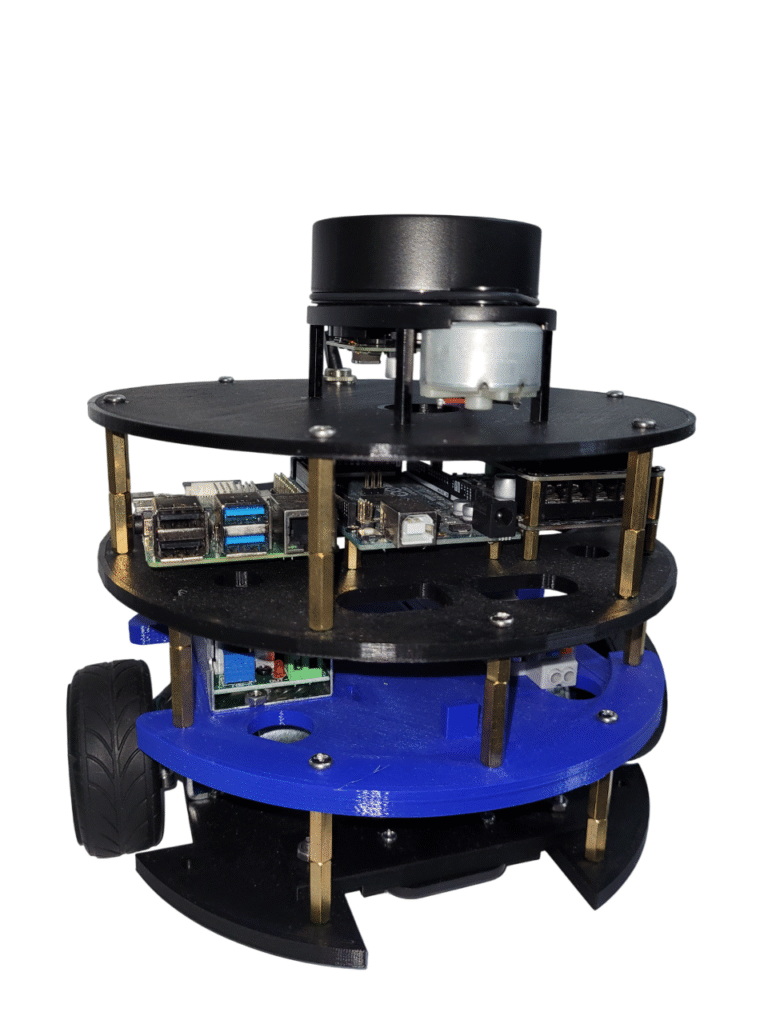
The purpose of this project is to advance accessibility in robotics. Traditional mobile robots often require machine shops and specialized fabrication tools, which can be a significant barrier for many learners and researchers. To overcome this limitation, I designed a mobile robot that can be built entirely using 3D printing. With the increasing affordability and availability of 3D printers in libraries and makerspaces, this approach provides a low-cost and practical solution for individuals who wish to engage in hands-on robotics without access to conventional machining facilities.
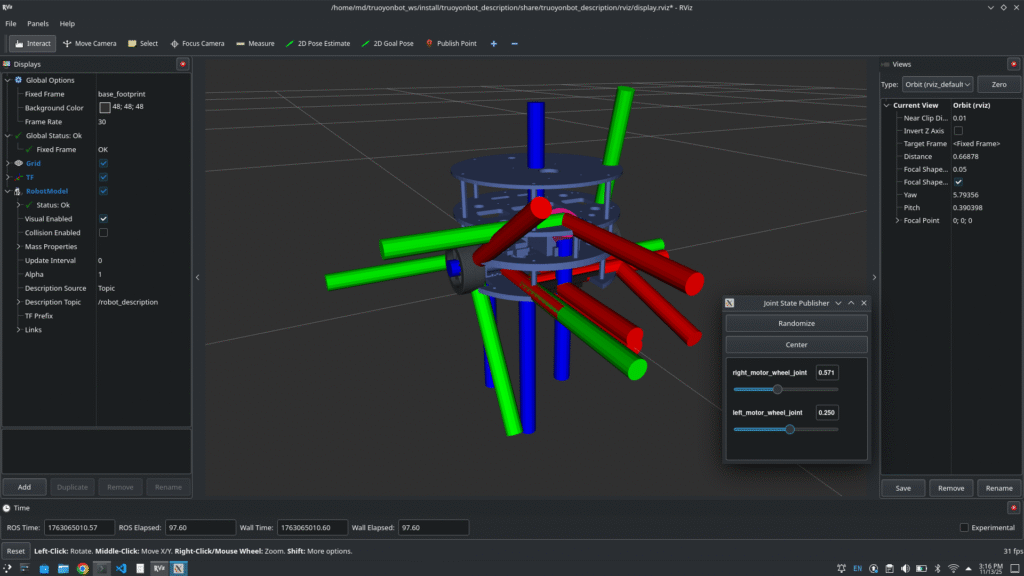
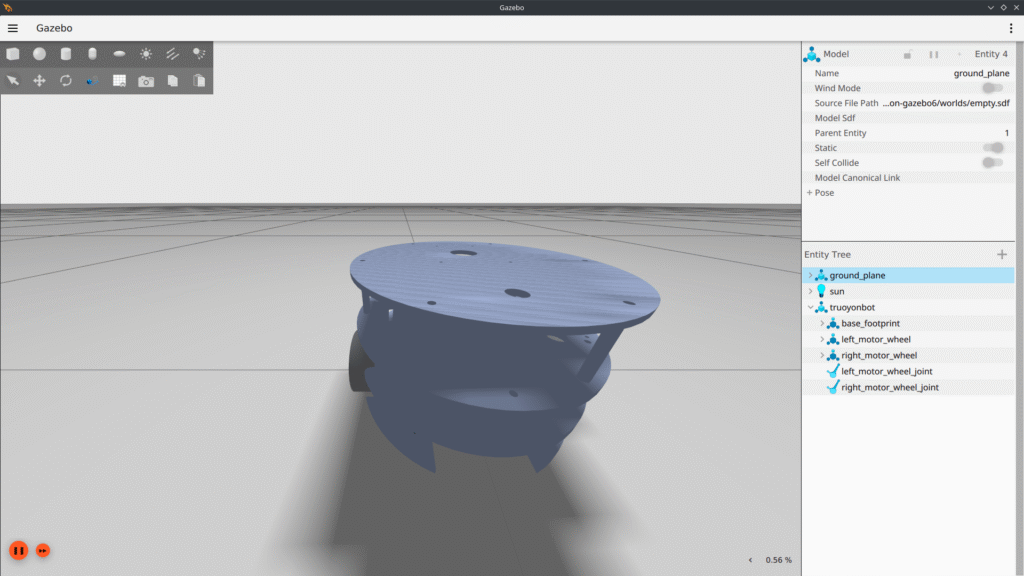
As part of my advanced robotics coursework, I studied path-planning algorithms and image processing techniques. This robot serves as an experimental platform where I can implement and evaluate these algorithms in real-world scenarios. Through this project, I aim to bridge theoretical concepts with practical applications, demonstrating how accessible fabrication methods can support meaningful research and learning in robotics.