
3-Dimensional Force Sensor for Gait Analysis
Did theoretical and computational analysis to design the sensor and used CAD and CAM software to fabricate using a CNC machine

A Robotic Manipulator for Applying 3D Force
Designed the end-effector in SolidWorks and built using 3D printer. Used Arduino to collect data from 3 commercial sensors

Digital Capacitance Measurement System
Designed the PCB using EasyEDA and programmed microcontroller to collect capacitance data from CDC chip
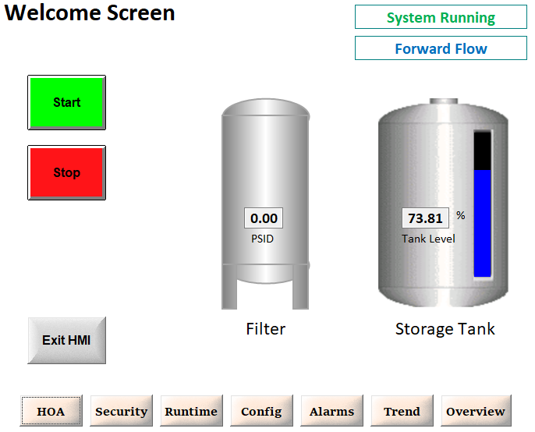
Automation of a water treatment system
Modeled the system using AutoCAD Plant 3d, wrote PLC program using RSLogix, and designed a human machine interface (HMI)

Interactive Image Processing Toolkit
A graphical user interface has been created to use image processing algorithms

IMU Testbench
ESP32-C6-based test bench for IMU evaluation, Qt-based GUI to control the testbench, see real-time data, and save the data

Two-Wheeled Differential-Drive 3D Printed Mobile Robot
(Ongoing Project)
A robotic manipulator for applying 3-axis force
Designed the end-effector in SolidWorks and built using 3D printer. Used Arduino to collect data from 3 commercial sensor
Automation of a water treatment system
Modeled the system using AutoCAD Plant 3d, wrote PLC program using RSLogix, and designed a human machine interface (HMI)
Image Processing GUI
A graphical user interface has been created to use image processing algorithms